导语:
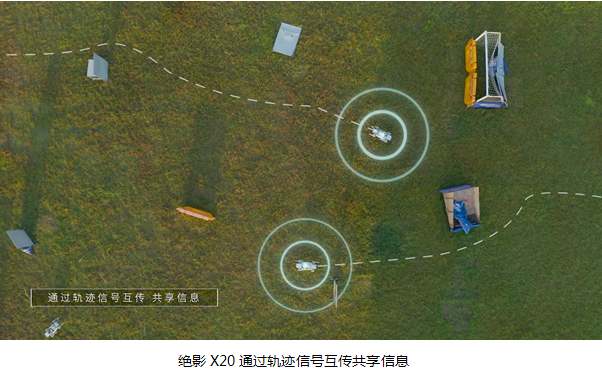
云深处科技首次公布其对绝影X20的全自主协同搜索测试:5台绝影X20四足机器人在3,000平米未知环境下,成功完成对8个模拟目标的协同搜索,整个过程由绝影X20全自主决策与规划,将进一步拓展机器狗在应急救援与勘测探索等场景中的应用潜力。

在应急救援与勘测探索中,人工开展相关作业常面临信息采集不足等问题,工作人员也可能面临缺氧、有毒有害气体、塌方等人身安全威胁。四足机器人能够替代或辅助工作人员先行进入高危场景,深入传统轮式或履带机器人较难进入的复杂地形;四足机器人集群协同,则实现了多台机器狗之间的搜索信息与路径共享,大大提升了未知环境中的搜索速度与效率。

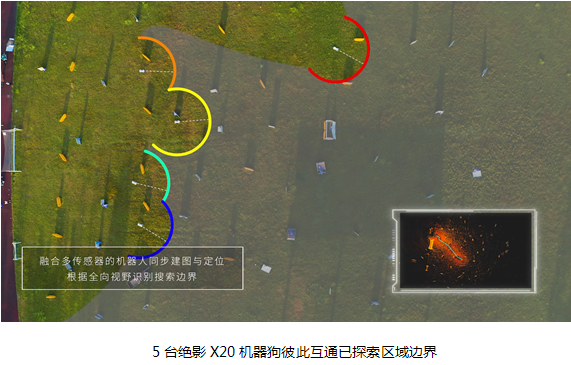
未知环境下的自主搜索是全球机器人研究的前沿领域,其难度与技术含量并不是固定动作群控或“机器人集体舞”所能比较的。此次测试中,绝影四足机器人搭载了高清全景摄像机,激光雷达以及自组网通信设备。通过激光同步建图与定位算法,对未知环境进行建图;利用全景相机进行深度学习目标识别;多台机器狗通过高效的协同机制,实时自主分配探索地域目标,在探索过程中,机器人自主规划路线并实现避障,最终完成大范围未知区域的集群探索与目标识别。
云深处科技感知算法主管唐威介绍:先进的集群协同算法是绝影X20之间协同高效完成搜索工作的重要关键。通过提取最简洁的有效信息进行通信共享,可大大减少多机器人之间通信带宽需求,增强系统在通信局限的环境中的适用性。相关文章已发表在2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR2022)。
云深处科技(DEEP Robotics)是全球四足机器人行业应用引领者,在先进运动控制算法、环境感知及AI算法等领域处于国际前沿,其自主研发的“绝影”系列机器人已在电力巡检、公共救援、勘测探索等多种应用环境中落地推广。除机器狗多狗协同外,云深处科技也在同浙江大学湖州研究院等合作伙伴一同探索不同类型机器人的协同作业,此前双方就在湖州黄龙洞尝试了四足机器人与空中机器人在地下空间的“机狗协同”。
了解更多及查看此次机器狗自主协同搜索测试视频,请关注微信“云深处科技”及其视频号。
热门文章

中国台湾地区宣布6月30日前关停3G服务,闲置频段将投入5G发展
2024/4/1 17:12:02
弗若斯特沙利文:百度文心一言稳居国产大模型第一
2024/3/27 14:26:11
小米汽车SU7/Pro/Max正式发布并上市,21.59万元起
2024/3/29 10:40:35
特斯拉大裁员殃及上海厂,电动车该泼冷水了
2024/4/16 14:37:02
艾瑞观点 | AIGC技术在营销领域应用三大方向
2024/3/29 10:27:22
外媒热议小米SU7定价:比特斯拉便宜 彰显品牌信心
2024/3/29 12:12:26



扫一扫,或长按识别二维码
关注艾瑞网官方微信公众号